





サーボモーターとステッピングモーターのどちらを選択すればよいですか? skysmotor.com
直線運動アプリケーションの大部分 (空気圧駆動タイプを除く) は、ステッピング モーターまたはサーボ モーターを使用して、通常はボールねじ、親ねじ、ラック アンド ピニオン、またはベルト と プーリー システムである駆動機構にトルクを提供します。直線運動に関与する他のコンポーネントとは異なり、モーターを選択する際には、通常、「どのテクノロジーを使用すべきか?」という質問に対して明確な答えがあります。これは、サーボ モーターとステッピング モーターの設計性能特性が大きく異なるためです。特定の用途にどのモーターを使用するかを決定するには、これらの違いを理解し、コストや複雑さなどの他の要素とのバランスをとる必要があります。
位置决め
サーボ モーターの基本原理は、閉ループ システムで動作することです。つまり、エンコーダーまたはフィードバック デバイスがモーターの実際の位置を示す信号をコントローラーに送信します。この情報は指令された位置と比較され、コントローラーは誤差を最小限に抑えるためにモーターに修正信号を送信します。その結果、位置決め精度が非常に高く、ステッピングモーターよりも信頼性の高い位置決めが可能になります。ただし、閉ループ システムでは制御パラメータの調整が必要であり、セットアップに時間がかかります。フィードバックに必要な追加コンポーネントと複雑さにより、ステッピング モーターよりも高価になります。
ステッピング モーターは開ループ システムで動作し、モーターが実際に指令された位置に到達したかどうかを確認するフィードバック メカニズムはありません。ただし、一般にステッピング モーターの方が正確な位置決めが容易です。 1 回転あたり最大 500 ステップという離散的なステップで動作するため、各ステップはモーターの回転の 0.75 度に等しいことになります。ステッピング モーターは、設計制限内で動作するときにステップを「失う」ことがないため、予測可能なトルクと速度の要件があるアプリケーションに対して非常に優れた位置決め精度を備えています。
速度
一般的なルールとして、ステッピング モーターは 1000 rpm 以下で動作するアプリケーションに最適です。これは、高速になるとステッピング モーターのトルク発生が急速に減少するためです。サーボ モーターは幅広い速度で動作できるため、一般に高速アプリケーションに適しています。
静止状態では、ステッピング モーターは、モーターに電力を供給することなく、その位置決めトルクを使用して負荷を所定の位置に保持できます。サーボモーターは静止状態で負荷を保持することもできますが、これを行うにはモーターへの電力が必要です。また、サーボモータは静止状態において完全に静止することはありません。コントローラーは常にエンコーダーからのフィードバックを読み取り、位置誤差を補正するために移動コマンドを発行しているためです。(この現象は「位置検索」と呼ばれることもあります。)
トルク
前述したように、ステッピング モーターのトルク能力は速度が増加すると急激に減少し、通常は 1000 rpm を超える速度でトルクが減少します。ただし、低速では、ステッピング モーターは、所定のモーター サイズに対して優れたトルク生成能力を備えています。ただし、ステッピング モーターの定格トルク (加速能力が制限される) を決して超えないようにすることが重要です。そうすると、脱調やモーターの停止が発生する可能性があります。
高速で優れたトルクを生成する必要があるアプリケーションには、サーボ モーターの方が優れた技術です。サーボモーターはモーターの速度が変化しても一定のトルクを維持することができます。
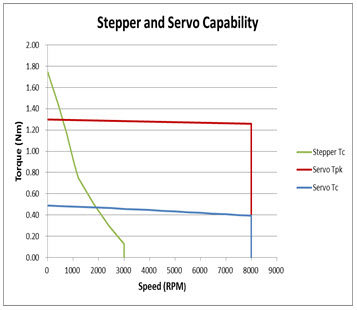
サーボ モーターにはピーク トルク定格 (T pk ) があり、連続トルク定格 (T c ) もあります。サーボ モーター (青) の連続トルク定格は、ステッピング モーター (緑) のように速度が増加しても急激に低下しないことに注意してください。
目的の動作を達成するために必要な電流のみを消費するサーボ モーターとは異なり、ステッピング モーターは負荷や速度に関係なく電流を継続的に消費します。その結果、より多くの熱が発生し、一部のアプリケーションではマイナス要因となる可能性があります。
まとめ
一般に、サーボ モーターは、正確な位置決め、高速性、および変動する負荷に耐える能力を必要とするアプリケーション (特に定格モーター トルクを超えるトルクが必要な場合) に適しています。位置フィードバックを必要とせず、モーターの設計制限内でのみ動作するアプリケーションの場合、ステッピング モーターは、よりシンプルでコスト効率の高いソリューションを提供します。
前の編:ステッピングモーターの共振を軽減するための方法について
次の編:Arduino (電源、モーター、Arduino) でステッピングモーターのトルクや速度を上げるにはどうすればよいですか?
No reviews
