





ステッピングモーターの共振を軽減するための方法について skysmotor.com
モーターの振動はモーターの性能と寿命に影響を与えます。すべてのステッピング モーターには共振点があるため、最初からモーターの振動を排除するための可能な解決策を理解することが重要です。
ステッピング モーターは、ローターが目立たない位置に移動できるように設計されています。ローターの慣性により、モーターはステップごとにターゲットをわずかに上回ります。これにより、目標点に到達する前にモーターが振動します。モーターの連続運動により、これらの振動から周波数が生成されます。周波数がモーターの固有振動数と一致すると、この振動が共振して騒音が発生します。この共振がステータとロータの間の磁界を超えると、モータは同期を失います。
電気振動低減方法
このセクションでは、ステッピング モーターの共振を回避するために使用できるさまざまな方法について説明します。物理的および電気的パラメータからモーター動作パラメータに至るまで、あらゆるものを調整できることに注意してください。ここで説明する各方法は、最終的な決定を下す前に慎重に検討する必要があります。特定のアプリケーションに最適なソリューションを迅速に見つけるために、ステッピング モーターの専門家に相談することもお勧めします。
共振はモーターの特定の動作速度で発生するため、その共振周波数での転流を回避することが問題を解決する最も簡単な方法です。一部のアプリケーションではこの方法を採用できないですが、可能であれば、共振速度を回避することでパフォーマンスにプラスの影響を与えることができます。
振動を軽減するもう 1 つの技術は、より細かいステップでのマイクロステッピングです。ステッピング モーターのコイルに通電すると、モーターの位置がオーバーシュートします。これは、磁束の急激な変化によって引き起こされます。マイクロステッピングは、コイルの励起エネルギーを低減することにより、ステーター磁束をよりスムーズに移動させます。このエネルギー削減の結果、振動と騒音が減少し、共振が排除されます。マイクロステッピングは、エンジニアがステッピング モーターの解像度を上げたい場合に使用される主な戦略でもあります。
低速アプリケーションの場合は、医療用分配機器でもロボット動作でも、入力電流を低減することでスムーズな動作を実現できます。モーターに低い電流を供給することにより、発生するトルクが小さくなり、トルク剛性 (dτ/dθ) も低下します。したがって、ローターを動かすために生成されるエネルギーは少なくなります。この手法を使用する場合は、設計にさらなる問題が生じないよう、十分なトルク マージンを確保してください。
モーターが動作すると、共振によりモーター巻線に AC 電流が誘導されます。この誘導電流は、モーター巻線を流れる DC 電流を妨げます。インダクタンスを追加するだけで、モーター巻線は共振を打ち消したり、共振周波数を下げることができます。
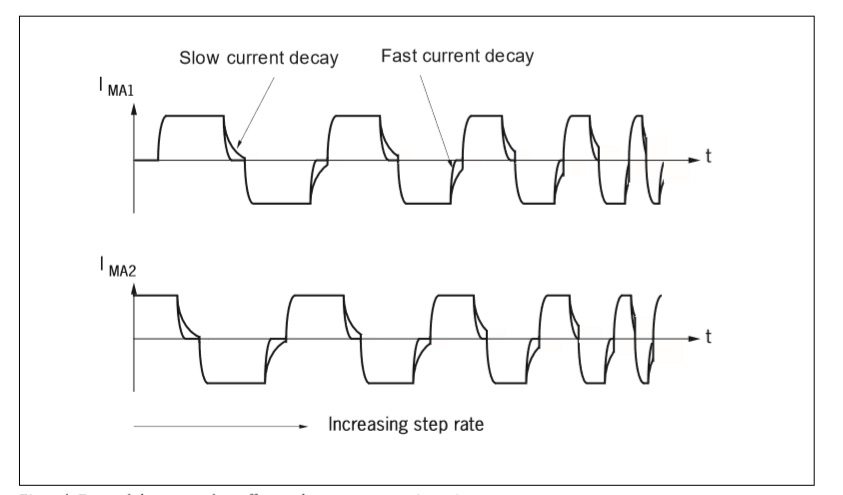
通常、電流の減衰が速いと、振動や共振が軽減されます。ドライバーが電流の方向を切り替えると、電流は一時的に減衰し、残留電流は他の方向の電流に設定されます。電流の減衰時間が遅いと、トルクリップルが増加し、振動が増加します。電流減衰時間が速いため、モータードライバーから送信される 2 つの電流信号間の干渉が排除され、モーター動作中の振動が軽減されます(写真1を参照)。
ステッピングモーターの相数を増やす
一般に、位相の数を増やすと共振も低減できます。位相が多いモーターは、マイクロステッピングと同様に、ステップ角が小さくなります。モーターの位相が多いほど、ローターを回転させるために必要な励磁エネルギーが少なくなります。励起エネルギーが減少すると、共振は解消されます。
したがって、2 相モーターには 8 極があり、5 相モーターには 10 極があります。5 相モーターは各相に 2 つの極があるように設計されているため、ローターは歯のピッチの 1/10 移動して次の相と位置を合わせます。したがって、5 相モーターは 1 回転あたり 500 ステップがあり、1ステップあたり0.72°があります。このより高い回転分解能により、ローターを回転させるために必要な励起エネルギーが少なくなります。そのため、ローターのオーバーシュートが少なくなります。マイクロステッピングが実現される場合、5 相モーターはより高い分解能で動作し、振動が大幅に軽減されます。
機械振動の低減方法
振動を低減するためにモーターの機械コンポーネントを調整する場合、モーターシャフトにダンパーを取り付けると効果的です。メカニカルダンパーを追加すると、シャフトに余分な慣性が加わり、振動の吸収に役立ちます。安定性の高い減衰効果を実現します。フランジマウントを追加すると振動吸収性も向上します
振動を減衰するもう 1 つの機械的方法は、ローターの慣性を調整することです。負荷慣性による減衰効果により共振範囲が変化する場合があります。異なる材料を使用したり、寸法を変更したり (ローターの長さを長くするなど)、ローターの積層プロファイルを変えたりしてローターの慣性を調整することで、共振点を移動して振動を減らすことができます。
ローターとステーターの歯の間のエアギャップを調整することで、設計者はトルク剛性を増減できます。上で述べたように、モーターが発生できるトルクの量が変化し、共振点が移動して振動が回避されます。
モーターに負荷がかかると (機械式ダンパーと同様)、ローターの慣性が大幅に大きくなり、モーターの振動が大幅に減少します。
前の編:2相ステッピングモーターと5相ステッピングモーターの違いについて
次の編:サーボモーターとステッピングモーターのどちらを選択すればよいですか?
No reviews
